
 企业资料通过认证
企业资料通过认证息。
1. 按下 MENU( 菜单 )键,显示菜单画面。
2. 选择下页“ 6 SYSTEM ”(系统状态 )。
3. 按下 F1 TYPE(类型 ),显示画面切换菜单。
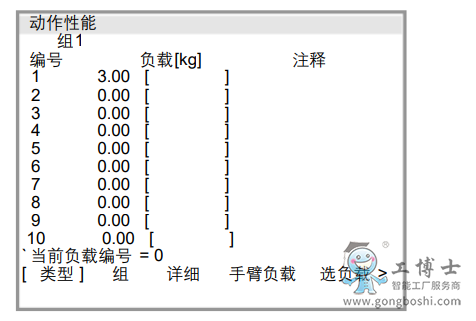
4. 选择“ MOTION ”(动作性能 )。出现一览画面

设定工具坐标系状态的 )刀具坐标。输入设定值时,显示出“ Path and Cycle time will change. Set it?”(轨迹 /循环时间将会变化,是否设定? )这样的确认信息,输入 F4YES(是)或 F5 NO( 否)。
7. 按下 F3 NUMBER( 编号 ),即可移动到其他的条件编号的负载设定画面。 此外,若采用多组系统, 按下 F2GROUP(组)即可移动到其他组的设定画面。
8. 按下 PREV( 上一步 )键,返回到一览画面。按下 F5SETIND( 切换),输入要使用的负载设定条件编号。
9. 在一览画面上,按下 F4 ARMLOAD( 设备设定 ),进入设备设定画面。
10. 分别设定 J2 机座部以及 J3 手臂部的负载重量。
ARM LOAD AXIS #1[kg] :J2 机座部负载重量
ARM LOAD AXIS #3[kg] :J3 手臂部负载重量
输入上述值后,
显示“ Path and Cycle time will change. Set it?”(轨迹 /循环时间将会变化,是否设定? )这样的确认信息,输入 F4
YES(是)或 F5 NO( 否)。
设定了 设备 重量,并断 电重启后, 这些设定才会生效。
以上内容来源于:网络
侵权删
了解更多发那科机器人信息可点击咨询:发那科机器人服务商

